実験
・準備 ドローンを動かすためのプログラムを考える。 ドローンを飛ばすためには、モータを回さなければいけないのだが、 この時モータの周り方が、いきなりMAXの出力であるとドローンが急 に上昇してしまい、出力をやめてしまうと自由落下してしまい、壊れてしまう 危険性があるので、出力の仕方を考える。この時出力時にモータの 回転速度をゆっくり加速、ゆっくり減速してほしいので、PWM制御と プログラムを用いてこれを実現する。 PWMとは高速スイッチングにより、電力を制御する方法のひとつで、 入力スイッチのON、OFFを繰り返すことにより、パルス幅を変調する ことによって出力電圧を調整することができる。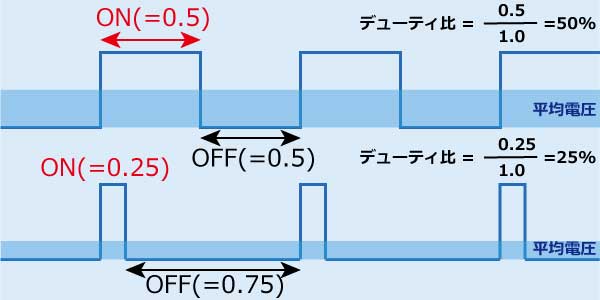
PWM制御
このPWM制御を用いてモータの回転速度をゆっくり加速、ゆっくり減速する
プログラムは以下のようになる。
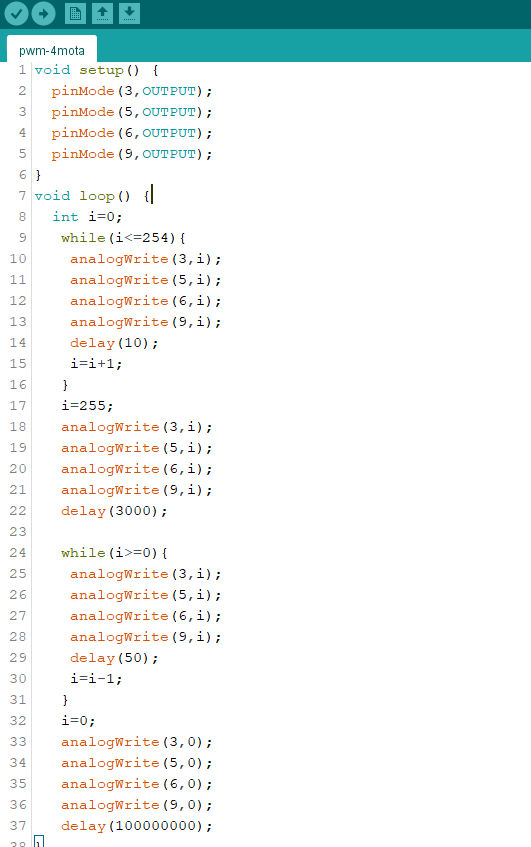
モータのPWM制御
これを用いることによって、ドローンは緩やかに上昇し、
緩やかに下降するということができる。
次にドローンのハードウェアを作製する。準備したパーツのドローン
を飛ばすために必要なものだけを用いて回路図を作成し、それをもとに
ブレットボード上に回路を組んでいく。

ブレットボード回路
この回路が作成出来たらUSBケーブル用いてArduinoとプログラムを書いた
PCを接続する。そして先ほどのPWM制御プログラムをArduinoに
書き込むとドローンは以下のように動作する。
ブレットボード上のドローン
これにより回路やパーツの動作に問題は見られず、
プログラムも正常に作動していること
がわかる。
先ほどのブレットボード上の回路が正常に
動作することが確認できたので、実際にドローンに
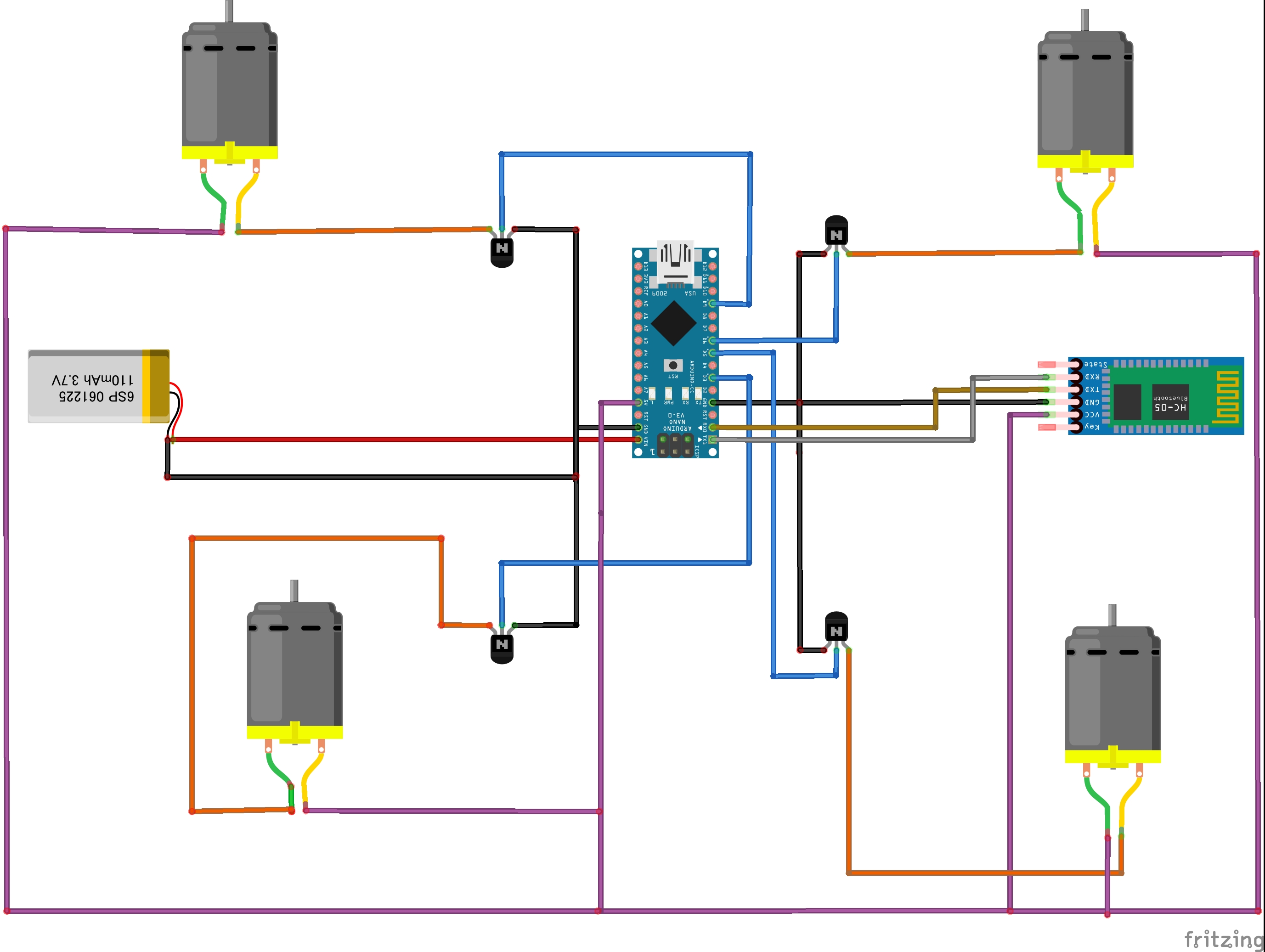
搭載する基板の回路を作成する。今回は、Bluetooth通信を行う予定で
あるので、Bluetoothモジュールを使う。この時の回路図は以下のようになる。
基板の回路図
この時画像のHC-05BluetoothはRN4020Bluetooth Low Energyモジュールを、
バッテリーは3.7V100mAhではなく7.4V400mAhのリチウムイオンポリマーバッテリー
を使用している。バッテリーは充電する必要があり、基板との接続を
手軽にするために、スイッチ付きの変換基板を使用している。
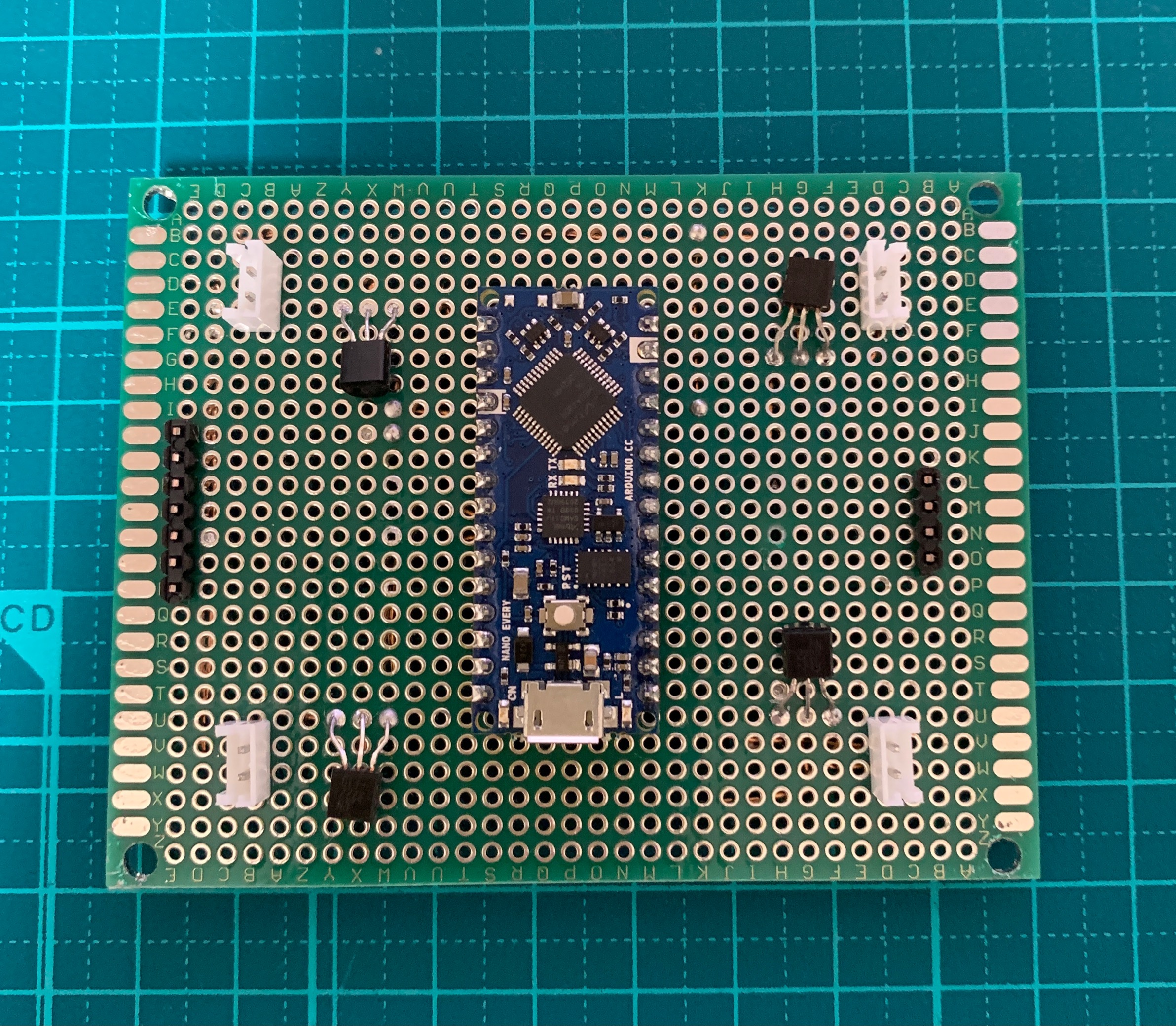
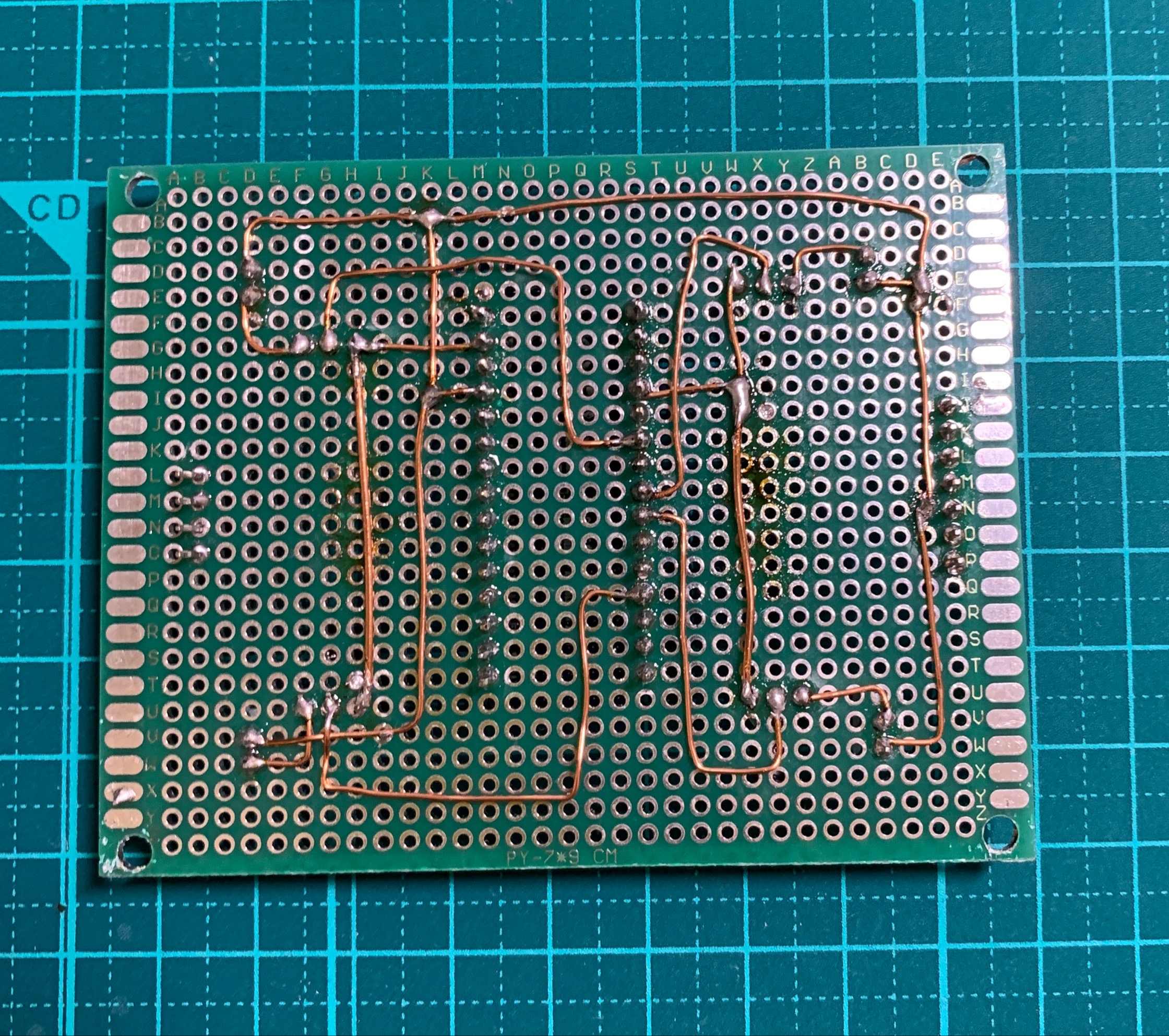
回路図を参考にし、それぞれのパーツをユニバーサル基板にはんだ付けをしていく。
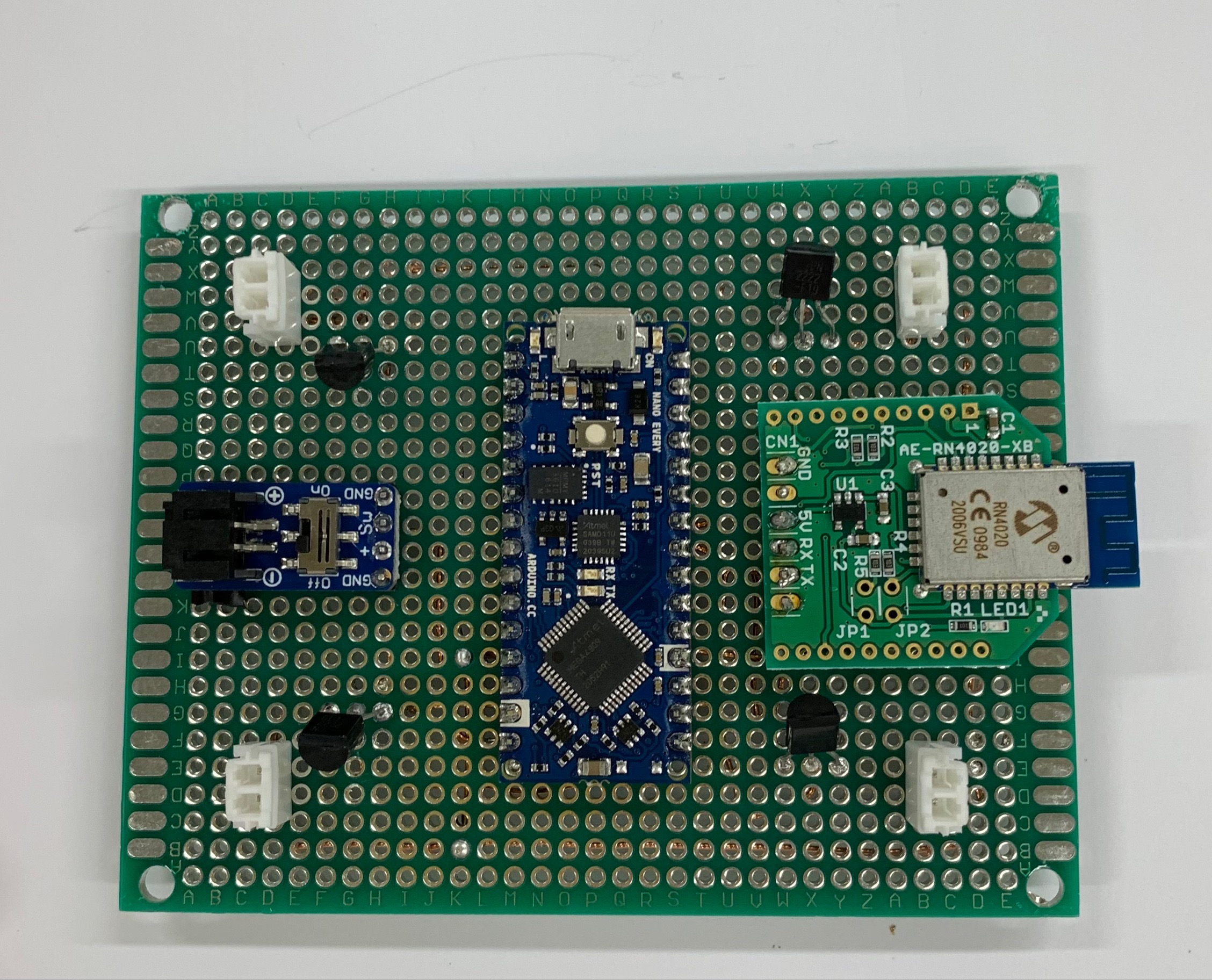
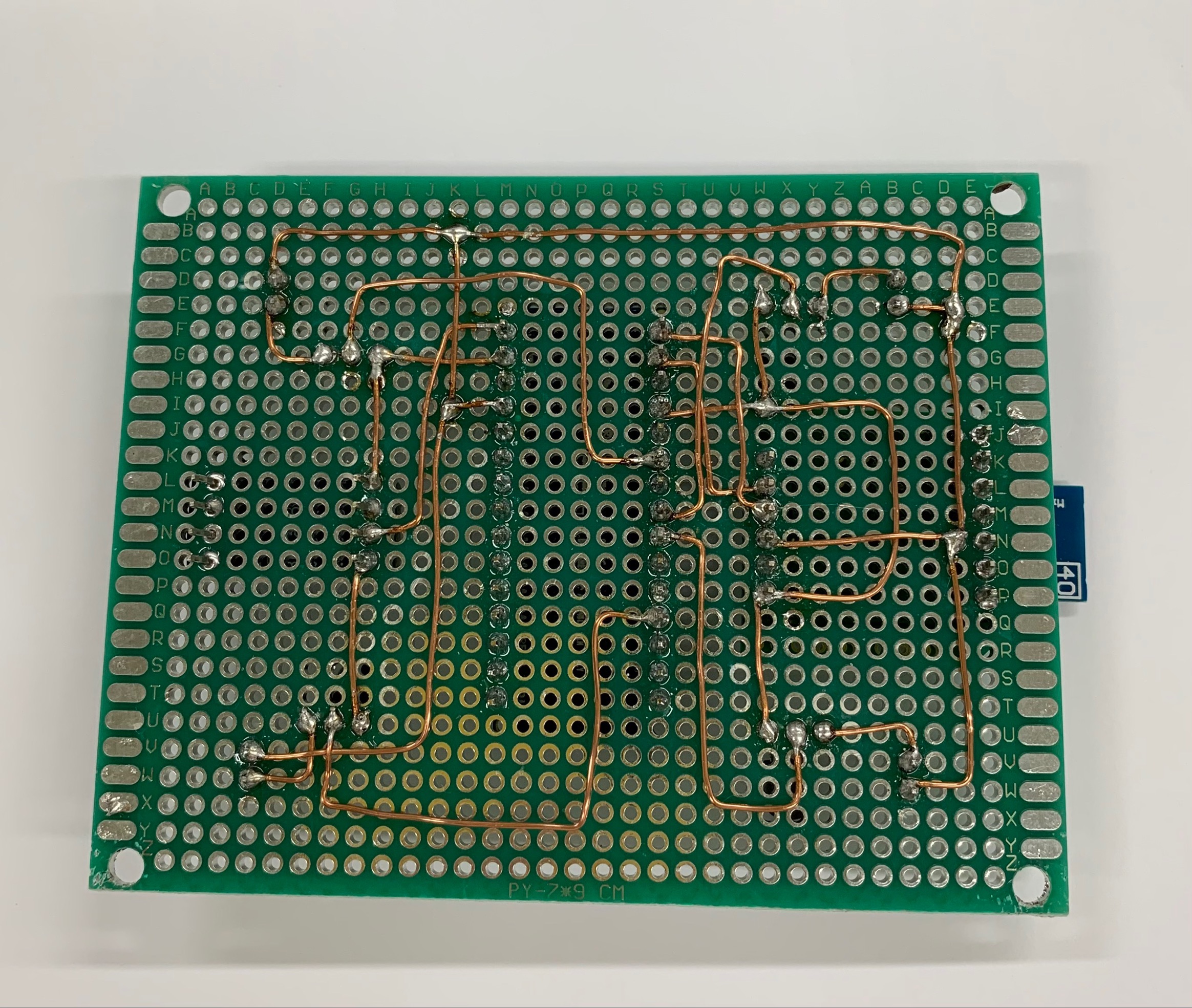
はんだ付けした基板 表・裏
はんだ付けした基板をドローンフレームにテープで貼り付け、
実験をしていく。
・実験
事前にマイコンボードに先ほどのPWM制御のプログラムを書き込んでおき、
バッテリーを装着する。広い場所でバッテリーのスイッチをオンにして実際に
ドローンが飛行できるか確認をする。
・結果
ドローンは飛行せず、動作さえしなかった。
・検証
バッテリー接続の状態であると、モータの接続が
1つの時のみ動作することが確認できた。
ドローン1モータ(バッテリー接続)
モータを2つ以上つなげてしまうと全く動作はしなかった。
これより7.4V400mAhのリチウムイオンポリマーバッテリーだけでは
電力が弱いことがわかるため、バッテリーをもう一つつけ電力を強化して
考える必要があるとわかる。
バッテリー接続では電力が足りないとわかったので、USB接続時のドローンの
動作確認をしてみる。この時モータ接続は4つである。
ドローン4モータ(USB接続)
この時先ほどブレットボード上で動作確認をした時と回路はほぼ同じ状況なはずであるが、
Arduinoが勝手に落ちてしまい、PWM制御のプログラミングの制御を正常に
行ってくれない。
USB接続の際モータ接続を3つにし、動作するかを確認してみる。
ドローン3モータ(USB接続)
3モータ接続の場合、先ほどの4モータ接続のときとは違い、Arduinoが落ちる
ことなくPWM制御のプログラム通り動作が行われることがわかる。
ブレットボード上のときは正常に動作していたので、一度はんだ付けしたBluetooth
モジュールとバッテリーのスイッチ付き変換基板を取り外し、ブレットボード回路
のようにした状態で先ほどと同様に実験してみる。
ブレットボード回路の基板 表・裏
ブレットボード回路ドローン4モータ(USB接続)
基板回路を用いた時と同様にブレットボード回路でも同じように動作の途中で
Arduinoが落ちてしまった。同様にモータ接続が3個のときには動作することが
確認できた。
この時モータのプロペラを一つ取り外すとプログラムが正常に動作する。
ブレットボード回路ドローン4モータ(USB接続・3プロペラ)
この時実際にプロペラを外したモータを触ると動作していることがわかる。
なぜプロペラをはずすと動作が正常になるのかは現在考察中である。
・今後
ドローンの飛行を実現するために、現在も調整中です。
現在は3.7V400mAhのリチウムイオンポリマーバッテリーを5.0V
に昇圧して、電力不足を補ったとき動作が正常であるかを検証しております。
ドローンの飛行が実現ししだい、ドローンを遠隔操作するためにBluetooth
モジュールを使用しPCとドローンの通信を試みようと考えています。